Localisation d’une chauve-souris par méthode acoustique
Localisation d’une chauve-souris sur la hauteur de vol pour des projets éoliens
Principe :
Pour mieux caractériser les comportements à risque de collision, nous avons utilisé une approche AFPR (Acoustic Flight Path Reconstruction, voir franchissement d’ILT) basée sur l’enregistrement stéréo (c’est-à-dire en utilisant deux microphones par enregistreur sur des pistes à 2 canaux). Le microphone sur le canal gauche est toujours placé au sol tandis que le deuxième microphone sur le canal droit est placé en hauteur (Fig. 1). Cette approche nous permet de localiser la hauteur des chauves-souris et de mieux caractériser les comportements de vol à risque de collision.
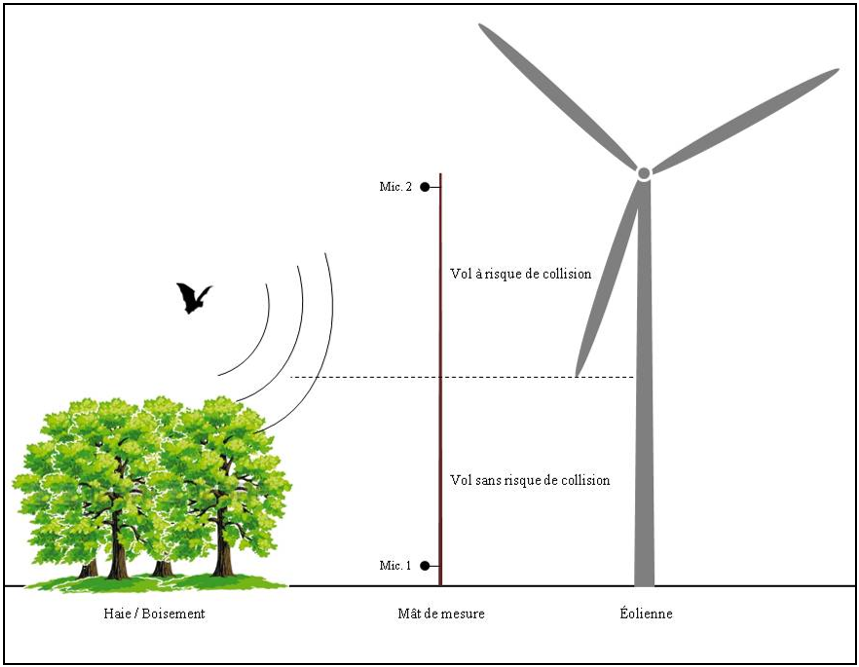
Figure 1. Exemple d’une chauve-souris volant à risque de collision. Position des microphones : le canal gauche (micro 1) au sol et le canal droit (micro 2) en hauteur. La position de la chauves-souris est retrouvée grâce au calcul de la différence du temps d’arrivée du cri (TDOA) sur les deux microphones.
Détection de franchissements d’infrastructures linéaires de transport (ILT) par des chauves-souris
Principe :
Pour caractériser les franchissements de chauves-souris, nous avons utilisé une approche AFPR (Acoustic Flight Path Reconstruction) basée sur l’enregistrement stéréo (c’est-à-dire en utilisant deux microphones par enregistreur espacés de 3,5 m sur des pistes à 2 canaux). Le microphone sur le canal gauche est toujours placé face à la route tandis que le deuxième microphone sur le canal droit est perpendiculaire à la route faisant face à l’habitat (par exemple, terres agricoles, haies, forêts) (Fig. 2 A). Cette approche nous permet de construire une trajectoire et d’estimer la position de la chauve-souris.
Ensuite, pour chaque enregistreur acoustique, nous avons calculé pour chaque cri de chauves-souris la différence de temps d’arrivée sur les microphones (TDOA), permettant ainsi de détecter si une chauve-souris traverse le plan médian des deux microphones. Lorsque la chauve-souris est sur le plan de gauche, le TDOA a une valeur positive, et lorsque la chauve-souris franchit le plan médian, le TDOA a une valeur négative (Fig. 2 B). Lorsqu’une inversion de valeur est observée d’un microphone à l’autre, nous supposons que la chauve-souris traverse le plan médian. Selon la conception spatiale de nos microphones (perpendiculairement à la route), nous sommes en mesure de déterminer si une chauve-souris venant d’un habitat se dirige vers l’ILT (entrant sur l’ILT) ou si une chauve-souris venant de l’ILT se dirige vers l’habitat (sortant de l’ILT) (Fig. 2 C).
Enfin, comme il n’est pas possible d’individualiser les chauves-souris en fonction de leur cri de transit et de chasse, nous comparons l’entrée avec la sortie en utilisant deux critères : identité de l’espèce et temps écoulé. Le temps écoulé a été défini en fonction de la distance entre les enregistreurs acoustiques appariés et de la vitesse de vol attendue de la chauve-souris (environ 4-15 m.s-1) (Fig. 2 C).
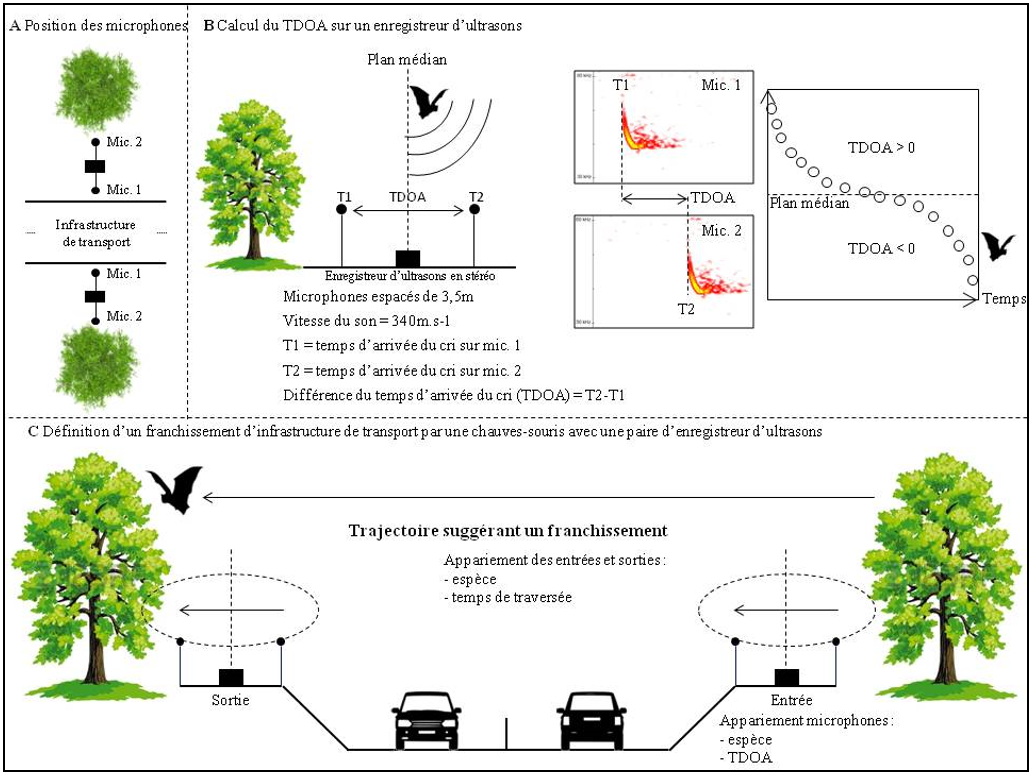
Figure 2. A. Position des microphones : le canal gauche (micro 1) face à l’infrastructure de transport (ILT) et le canal droit (micro 2) face à habitat et perpendiculaire à l’ILT. B. Calcul de la différence du temps d’arrivée du cri (TDOA). C. Nous définissons un franchissement lorsqu’une chauve-souris qui est entrée sur la route d’un côté a été détectée en sortant de l’ILT. Comme il n’est pas possible d’individualiser les chauves-souris en fonction de leur cri de transit et de chasse, nous comparons l’entrée avec la sortie en utilisant deux critères : identité de l’espèce et temps écoulé.
Citation
Claireau Fabien, Bas Yves, Puechmaille Sébastien J., Julien Jean-François, Allegrini Benjamin and Kerbiriou Christian (in revision). Bat overpasses: an insufficient solution to restore habitat connectivity across the road
Téléchargement des scripts
https://github.com/FabienClaireau
Contact
f.claireau[@]naturalia-environnement.fr